Novel architectures for EV power management: About distributed architectures
I. EV Systems Challenges
Electric Vehicle (EV) characteristics introduce a new paradigm in the Electric/Electronic (EE) architecture design. They impact more than 30% of essential classic vehicle functions, such as lateral dynamic control, in-car thermal management, fuel/mileage estimation, telematics & human-to-machine interface and, of course, electric energy management. New life phases are surfacing, requiring new functions to be developed: battery re-charging, thermal preconditioning, and specific EV services.
The future EV generations offer a lot of opportunities in developing and inserting new technologies in electrical motors, chassis and power mechatronics. They will embed new components that are presently researched by engineers all around the world. The long-awaited benefits of this massive ongoing research might be partly compromised by inefficient or non adapted vehicle EE architecture.
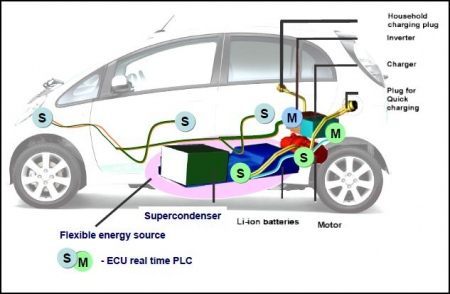
The present first EV generation is mostly based on technical solutions that are derived from existing combustion vehicles (see figure 1), comprising a similar EE platform with specific add-ons. The second generation will integrate optimized power subsystems. We believe that EE platform breakthrough will arise within the 2018-2020, enabling a fully optimized third generation to reach the market. This paper shares our vision and provides a status of some research that was conducted on breakthrough EE EV platforms.
The basic function of EV is energy distribution, supported by power distribution. This function has to be combined with the rest of the architecture, with minimum weight, volume and cost. The "ideal" power architecture is therefore compromised to meet all "non power" requirements.

Figure 1. Electric Vehicle EE platform roadmap. For full resolution
The number of car actuators has multiplied by 15 to 20 since the sixties. Together the number of ECUs has also drastically increased, creating complex network topologies. The challenge on onboard networks is to reduce complexity of units operation to the habitual level for the consumer. Creating more simple platforms, based on distributed architectures is a new venture for engineers. Embedded EV network should provide power and control integration of all systems.
II. Breakthrough Ev On-Board Networks
The third generation of EVs should comprise an EE platform integrating mixed electricity sources management. Power networks will have to ensure functions similar to those realized by Smart Grids. They have the capability to maintain balance between mixed generating sources and multi-voltage electricity consumers. These power networks have not only to ensure power supply but also to optimize the efficiency of energy usage while ensuring safety and protection to the used equipment. Those network requirements, applied to EV, will be topped by the automotive industry prerequisites that are compactness, reliability and cost control.
The behaviour of the power consumers/generators can be seen as a sequence of "power shots" that have to be permanently adapted, according to the car movement and the internal equipment supply demand. The electro-mechanical and electronic functions management have therefore to take place in real time. The time paradigm requires high accuracy control of ongoing fast and multiple events onboard the EV.
The foundation for the technological innovation for the third generation EV EE systems is the car range increase (mileage by charge) and cost reduction.
It materializes into two significant challenges:
• Energy Mix : optimized management of different energy storage ( Ni-Mh/Li-Ion combined with super capacitors) and sources (converters)
• Weight gains: better battery compactness, simpler harnesses (less wires)
Four objectives were set for EE system innovation insertion:
• 10% range increase with same battery capacity
• Realization of a multi power streams platforms
• 5% hardware cost reduction (minimum) for network related wiring and ECUs
• Increase of driving comfort level.
The achievement of a 10 % mileage gain without increasing the capacity of batteries is possible by the combination of a more accurate power management with movement energy recovery. The car energy grid can be re-structured with the addition of fast charging capacitors. Such fast storage capability may recuperate very small mechanical pushes/brakes, which is very suitable for city driving cycles. Real time Power Line Communication (PLC) is part of the third generation EV technologies offer because it allows a precise image of the power condition of the whole Electric Vehicle.
III. Requirements For Automotive Plc
The first samples of the Power Line Communication (PLC) technology appeared in the years 1930-40, for a voice transfer. PLC is nowadays widely used for home/office high speed internet communications. Introducing PLC in the automobile asks for more than just adapting the existing solutions to the car requirements. It requires to significantly re-think the technology to develop specialized solutions, adapted to stringent environment conditions and cost objectives.
 Table 1. Classic PLC vs. RT PLC in automotive systems
Table 1. Classic PLC vs. RT PLC in automotive systems
The addition of real time features to the classic PLC technology opens new capacities needed for EE car systems. Real-Time PLC (RT PLC) is a new and adaptive technology for the vehicle communication and onboard management. A comparison of the technical features of classic PLC vs. Real-Time PLC technologies is made in Table 1.
The table shows that Real-Time PLC technology is very adapted to vehicles EE architectures. It gives a universal solution for different automotive technical designs. For example, the introduction of RT PLC architecture has enabled significant savings: quantity of wires at driver door reduced from 26 to 4 and total length of wires in door space are reduced by 4 times. Similar benefits have been harvested in other systems in combustion cars as well as hybrid cars. In the course of the design of the 3rd generation EV platform, it will be possible to introduce different variation of system integration.
Requirements imposed by automotive power management on PLC real time communication protocol demands efficiency (usable code vs. data traffic), immunity and synchronization.

Figure 2. Automotive networks performances comparison.
Figure 2 compares RT PLC with CAN and Flexray that are the two other protocols to potentially be used in third generation EV EE platforms. The communication channel of RT PLC is by far the most efficient, combining specific address management and error recovery algorithm. The RT PLC net data transfer, which is similar to CAN, requires the development of a distributed architecture, with local functions management. Synchronism of the bus is a must for EV energy-mixed optimised power management. It is a design feature of its communication channel. CAN and Flexray allow ways of synchronization for energy management with much bigger expenses of resources. Implementation of classic PLC is difficult from the technical and economic points of view. Practical realization in serial EV is proved by high economic benefit. RT PLC combined with a distributed architecture therefore provide a breakthrough solution EV EE platform.
IV. EV EE Distributed Architecture
A EE platform with the distributed architecture deployed on RT PLC network is proposed for the 3rd generation EV. Its general implementation scheme is composed of three systems: energy management system, movement control system, and car body units control system. The three systems share a uniform data field and the same onboard EV process synchronization. Our experimental systems use a 256 byte data field, with process synchronization frequency of 200Hz.
Energy management in real time
The control of each energy consumer in the vehicle has to occur in real time. Modern asynchronous control systems, often indirectly linked, can't handle multiple consumers simultaneously. The impact on the on-board power network is immediate: instabilities and interference are created that imply strong requirements to be imposed to the mounted equipment.
The problem in asynchronous power systems is always to balance the energy source. Synchronous power network opens the door to a flexible energy source which can be seen as a device with dynamically changeable exchanges between elements of accumulation and energy delivery. The flexible energy source is an intelligent storehouse of energy which is configured to provide at each moment the best efficiency for delivery and energy accumulation.
Energy switching between drive and flexible energy source requires fast response with a frequency range of 1 to10 kHz. This frequency is fixed by the actuator management frequency and the spectrum of the actuator mechanical load. Power management performed at that frequency allows reduce losses of " recoverable " energy.
The flexible energy source allows increased energy recuperation from 20 % to a range of 5080 % for various modes of movement. The most efficient energy recovery will be in a city motion mode. In this case, most of the energy transaction in a mode "start-stop" is performed by a super-capacitor. The super-capacitor also opens the possibility of recuperation in the case of completely battery charged.
EV motion management
The classic scheme of EV, composed of a movement actuator (motor) is not definitive. Variants containing two motors or all-wheel motors that might bring economical benefits are studied. The presented architecture applies also to those configurations. The movement actuators are synchronized automatically due to the real time network communication.
The movement function and the energy management function mirror each other in the electric to mechanic transitions and reversely. In the proposed platform, RT PLC1 is in charge of the two functions: movement and power balance.
To re-enforce the VE system stability, movement control sensors have been added. Sensors participating in movement control such as break pedal, gas pedal, parking aid and brake subsystem are integrated in RT PLC2. RT PLC1 views these as part of its own processes and data thanks to the synchronization with RT PLC2. The car integrated system allows not only to reduce energy conversion into heat during braking, but to implement algorithm improving driver's comfort.

Fig. 3 Third Generation EE platform proposal
Control of EV body equipment
Compared to combustion vehicle, the impact of the body EE units has a considerable impact on the vehicle autonomy. The primary purpose of RT PLC2 network is to be base for realization of optimum control in 12V units within several sets of car options, including the suppressions on redundant sensor controls and actuators. The RT PLC2 system's important role is to control the 12 Volts power condition of each body EE unit by providing failure & short-circuit isolation and peak/surge current smoothing. RT PLC2 network, encompassing all 12 Volts body units is considered as a unique intelligent energy consumer. It belongs to the global energy management network RT PLC1. The combination of RT PLC1 and RT PLC2 constitutes an integrated EE platform. Vehicle demonstrator A physical implementation of an RT PLC integrated EE platform has been conducted in the frame of the Russian YO-mobile project. Developed for a hybrid vehicle that combines combustion engine and super-capacitors, the RT PLC platform integrates all 12 Volts main car systems. Currently tested on the road, it demonstrates the efficiency of the EE platform. The results accumulated during the development and testing of the YO-mobile provides an excellent base for the development of the third generation EV Electric & Electronic platform.
V. Conclusion
The complexity of automotive embedded EE systems is poised to grow during the coming decade. Some people even predict an acceleration of the complexity due to EV and HV deployment. This prediction may seriously alter the competitiveness of future cars. The past and present EE evolutions were based on existing architecture with the same network technologies/topologies combined with sub-systems optimizations to contain development costs. This approach being often detrimental to the final cost of the whole system.
This study aims to look at the car systems from another angle, looking at breakthrough technologies that are competitive and possible to implement successfully within EV and HV.
The context of PLC, short-lived in the automotive context when implemented in the classic configuration, brings real opportunities when it is functioning in real time within a distributed architecture: better node diagnosis capability, easier equipment diversity management and improved safety/reliability.

Figure 4. Physical implementation of EE distributed platform. For full resolution
This architecture solution was implemented successfully into a super-capacitor based hybrid vehicle. Its technical maturity is presently demonstrated for energy management and other vehicle functions as well (seat system, door systems, air-conditioning, lighting system...). Extending the solutions to a fully electric traction vehicle with energy storage mix (supercapacitors & Li-Ion battery) is part of the present work conducted by the companies.
The strategy of deployment of the RT PLC technology incorporates standardization and the development of a RT PLC architecture design platform.
About the authors:
El Khamis Kadiri graduated in mechanical & energy from the Lorraine Polytechnic University (France), and microelectronic engineer from the Bordeaux university.He started his career as a Research engineer in the Scientific Research National Center CNRS. In 1998, he joined PSA Peugeot Citroën car maker as Packaging and Assembly expert at the Electronic department.
Mr. Kadiri covered various positions as a project leader in the new EE system conception and ECU development. He also participated in European projects, especially in PIDEA and MEDEA+. Presently he is in charge of the Electronic technological strategy in the Research and Advanced Engineering Division. His main activity is focused on the new EE architecture for the next car generation (HEV, EV, etc.).
Valery Anisimov graduated in engineering and physics from Saratov State University, and engineering and design from Moscow Physics and Engineering Institute. Since 1978 worked in the aircraft industry as the chief engineer (autopilot control system). After that he worked in medicine sphere (medical control systems) and engine control system for "Buran" space shuttlecraft.
1995 he started to work over engine control systems for vehicles, his project was bought by automotive supplier Robert Bosch GmbH. In 2003 he became a chief constructor in "Industrial Group FINPROM-RESOURCE" llc. His core competence is control systems. He is the main designer of technologies ASG and RT PLC.
Philippe Briot obtained a General Engineering degree from the Gramme Institute and post-graduated in Telecommunications and Microwaves at the University of Louvain la Neuve (Belgium) where he worked within the Microwave Research Lab. At PSA Peugeot Citroën he held the position of Quality Assurance Manager with responsibility for component technologies and automotive electronic systems. He has also worked in the Electronic Warfare Center of the Belgian Air Force , Hewlett-Packard (networks), the Thomson-CSF's Department of Technology (electronic components) and the European Space Agency (EEE space standards).
In 2002 Philippe founded Briot & Associates, a company composed of high profile engineers providing support and consultancy in EEE components, EE systems, new technologies insertion and innovation management. The company is very much involved in future vehicles architectures deployment and EE system's reliability & safety.