Real-time power management system for sensorless motor control and short circuit localization
I. Car EEA context
In today's vehicles, adding a new function in the pre-existing Electric/Electronic Architecture (EEA) is often accomplished by the incorporation of one ECU connected to its own sensor & actuator components. The increasing number of ECUs in vehicles becomes critical in term of integration into the vehicle since available space for electronic is no longer maintained. In term of complexity it also leads to an increase of wires, communication networks, energy management and so forth. Thus disruptive solutions are required to reduce numerous wires & ECUs and to optimize energy consumption. The introduction of PLС in the vehicles combined with increased use of mechatronics is a possible solution.
Components vs. wire harness
For a middle range or C segment vehicle we can consider a total of 35 embedded ECUs, 20 ECUs for the power train, chassis and HMI & multimedia domains. For the body & comfort domains, 15 ECUs are implemented within around 100 sensors and actuators. Only some integrate an electronic module within the mechanical part we call mechatronic modules and only a few of these ECUs are mechatronic types.
Regarding the diversity of actuators we consider using the PLC solution on the small and medium actuators which are used for mechanical movement in the door and seat areas where, for the sensors, the electronic characteristics do not impact the PLС solution and the mechatronic size. Indeed, the range of the average current for these actuators is from 1 to 10 Amps with a maximum inrush current of 25 Amps in few cases. The command is either very simple or uses a low frequency PWM. The response time of these functional systems is around 200ms within a sensor signal response in the range of 20 to 200Hz maximum.
The wiring harness in this body & cockpit area can count more than 700 wires which means more than 1,3km of wires, 1400 connexions and 25kg. For instance, the driver door can integrate up to 50 wires for the locks and the contacts, the anti-pinch window lifter, the mirror, the control panel, the several lights, the free handle system, the loudspeakers, etc. The number of wires in an electrical seat reaches a similar level.
Body and cockpit are heavily wired areas in the vehicle. They offer a great cost reduction opportunity for Power Line Communication (PLC) especially in door and seat sub-systems.
Reliability and safety
For the electric part of a vehicle, the main sources of default come from the wiring harness and the “complex” ECUs. For the wiring harness, the high number of connections in the car body participates strongly in the decrease of the vehicle's reliability. A 10% reduction of the wiring harness will increase its reliability by 20%.
Regardless of the passive safety system, the functions of the body and comfort domain do not require a high safety levels. According to the ISO 26262 standard the maximum Automotive Safety Integrity Level (ASIL) in this domain should be ASIL B or A. Critical risks in this body area are related to current surge and short circuits.
Detection and control of the current consumption level therefore improve the sub-system safety, the reliability of the electric components and the harness protection. These mechanisms also extend functional performance and reduce the vehicle energy consumption.
II. Real-time PLC network
Classic vehicle's multiplexing often requires 4 wires to supply power and establish communication. PLC electrical network requires the minimum wire number, two, therefore reduces the fuses and simplifies connectors. The RT PLC (Real-Time PLC), PLC based technology, adds electrical energy management capabilities.

Table 1: Advantages vs. disadvantages of Classic PLC
The main technical principle of PLC technology is to transfer power supply and high-frequency signal in the same wires. But there are some technical risks in the technology, mostly for communication signals. It is difficult to provide communication with stable speed of data transmission in time. This proves to be true through experiences in European and Asian companies.
The figure 1 describes a Real-Time PLC (RT PLC) topology, a PLC-based combination of distributed and synchronous network. This new PLC network development solves technical problems related to the introduction of PLC technology in automobiles.

Figure 1: RT PLC topology - (PLC Network: Energy consumers are connected to electric network on the principle of optimal distribution of electric capacity)
In the RT PLC network the energy transfer control is distributed, the synchronous communication ensures a reliable sub-system management, and a specific communication code provides improved noise protection compared to the standard CAN bus.
Reflex programs in Slave
Each electronic component (Master & Slave) monitors the state of other electrical units. RT PLC not only distributes energy on wires, but also controls energy streams in real time. The network intelligence is created by the software embedded in each slave unit, which set contexts for each action to be conducted, like a state machine.
The velocity (speed) of the “reflex” programs, reaching as low as 10-5 seconds, allows monitoring of transients. A better drive of electromechanical devices is obtained with such real-time algorithms, generating less energy losses into heat and electromagnetic noise.
The final result is a true mechatronic solution. The sub-system captures each 5 milliseconds the picture of the entire network data and status. The sub-system functions are shared between the master and the slave modules; fastest functions being implemented in slave modules, close to interactions. These “reflex” functions are conducted automatically, under certain conditions, much like neurological reflexes. They are part of the slave module intelligence. For example, it will set current restrictions or establish a dedicated profile under a pre-defined mechanical condition of an electric motor. Each slave unit embeds its own set of reflex programs, dedicated to the connected sensors and actuators.
The system is controlled via the combination of the programs located in the master and the slave units, including the reflex programs. This arrangement of functions proves to be cost effective because it enables to develop sensor-less control. In this case, the current sensing of electric motor combined with advanced algorithms, is able to replace classic sensors for coordinates, speed and mechanical load measurement.
Sensorless control
This technology enables the development of sensor-less control algorithms. For example, Hall sensors are implemented in conventional actuators to realize the “position memory” function. Sensor-less control reduces the system cost and opens new possibilities for engineers.
Electric motors, available on the market, were used in seats and windows systems and actuator without connection to common gages and electronic blocks were implemented. To add intelligence to the actuator, the Slave block has been used. Finally, a specific algorithm was developed to provide needed informations: actuator coordinate, speed and instant moment of force. Besides sensor-less functions, the slave block also drives many other applications. In a door system, it will manage simultaneously the door locks and the lamps. The same module, with marginal changes, can be used for front and rear doors. This block is a flexible mechatronic system element.

Figure 2: sensorless actuator
Only few reflex program types are used for the many units. The combination of these program elements create a complex system. The real time system allows 2-motors synchronous drive to create complex point to point movements and to remember sets of measurements, coordinates or system contexts.
In addition to electromechanical functions the reflex programs ensure the protection against short circuit and the wire breaks diagnosis. The instant current level of the system is also supervised.
RT PLC breakthrough in mechatronics
The development of RT PLC has overcome the disadvantages that impeded the introduction of classic PLC in automobiles, as illustrated in Table 2. Thanks to the addition of distributed intelligence and synchronicity, true sensor-less control and power management control is enabled both at sub-system and vehicle level as well.
The RT PLC technology opens doors to a full electric load diagnosis and a smooth control of actuators. Introducing such functions in combination with harness and sensors cost savings, makes the RT PLC technology solution a real opportunity for system integrated mechatronics. These openings were confirmed by physical demonstrators, seat and door sub-systems.

Table 2: Advantages vs. disadvantages of RT PLC
III. Realization of systems: Seats
A feasibility study was conducted on a seat systems. The selected seat system, manufactured by an European supplier, contained 6 actuators. The original system included several options: seat index memory, heating and floor lighting. A RT PLC network composed of 2 slaves was realised; one was located in the seat and another in the back of the seat thus ensuring the original functions. The new architecture ensures the original functions. It is described in figure 3.

Figure 3: Seats EEA
The network was realized without addition of any specific electronic block. The power supply is contained in the Master. This configuration ensures that the influence of the seat system PLC is contained within an independent branch isolated from the other car systems.
If the RT PLC technology is implemented similarly in a complete set of car seats, important gains are expected; weight reduction of wiring harness by more than 50%, and a direct economical gain of 15%. Technical complexities of topology and units interaction are managed by the embedded software. Moreover, the parameters' system can be re-configured fast and locally.
Usually the word " economy " is associated with Low Cost and Ultra Low Cost technologies with reduced functional expectancies. The combination of RT PLC and energy control yields opposite results: the functional possibilities expand.
Opportunities offered by the RT PLC technology open new fields for engineering. Innovation in seat recline & slide anti-pinch and massage functions were developed thanks to the sensor-less control of motors that allow dynamic memory to remember or replicate a movement trajectory.
IV. Realization of systems: Doors
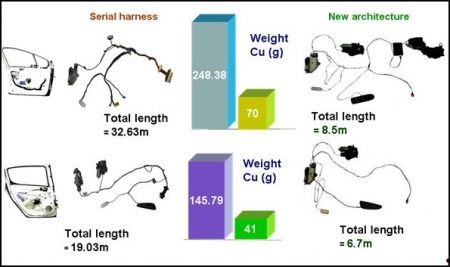
The developed system encompasses the functions of 3 sub-systems: window control, car access and mirror control. The new architecture ensures power supply to all units in a door. Its implementation in the driver door which is the most technically complex, contains 3 slaves and 4 wires; 2 wires PLC + 2 wires for the sound system instead of a 26 wires usual harness. The sensors' and actuators' wiring is drastically simplified by a direct connection to a slave unit. The wiring harness and its economical gain are presented in Figure 4. The expected system cost reduction is about 15%.
One slave unit services 6 devices; 3 actuators and devices such as lamps, sensor control etc.

Figure 4: Copper weight and wire length in doors
There are three types of slave units in doors:
- The first type operates all units of a mirror
- The second type operates window raiser, lock and door lamp
- The third type supervises the buttons panel and LEDs.
The second slave unit type, with some technical changes, can be used for rear doors. This slave module fits within the same physical volume as a regular actuator module. The module also realizes the memory function and the anti-pinch protection for the window.
Slave units are used for full energy distribution to the connected devices. The system is protected from short circuit in the network and detects wire breaks. Detection reaction time is 3×10-5 second, thereby preventing destruction of vehicle harnesses and units.
V. PRESENT AND FUTURE DEVELOPMENT
The seat and door systems demonstrators embedding the RT PLC technology have been tested successfully, both functionally and physically. New options are studied, especially for high-end seat solutions.
The resulting cost reduction, already promising, will be enhanced by the integration of the distributed intelligence within the sensors and actuators of the system.
The strategy of deployment of the RT PLC technology incorporates standardization and the development of a RT PLC architecture design platform.
About the authors:
Eric Fitter is project leader in advanced engineering for EEA systems at PSA Peugeot Citroen. In 1999 he received an engineer degree in Electronic Engineering with a specialization in sensor and instrumentation from the ENSEA of Cergy Pontoise (France).
He joined PSA Peugeot Citroen in 2002 at the networks and components division development and since then he has covered various positions in conception, validation and integration of system networks as LIN and FlexRay. Mr. Fitter has participated in European projects, especially in Medea+,SSAE for component conception, and in FP6, Veesa & Easis for EEA standardization. For the last three years he led innovative concepts for ECU number reduction and for the EEA conception processes.
Philippe Briot obtained a General Engineering degree from the Gramme Institute and post-graduated in Telecommunications and Microwaves at the University of Louvain la Neuve (Belgium) where he worked within the Microwave Research Lab. At PSA Peugeot Citroën he held the position of Quality Assurance Manager with responsibility for component technologies and automotive electronic systems. He has also worked in the Electronic Warfare Center of the Belgian Air Force , Hewlett-Packard (networks), the Thomson-CSF's Department of Technology (electronic components) and the European Space Agency (EEE space standards).
In 2002 Mr.Briot founded Briot & Associates, a company composed of high profile engineers providing support and consultancy in EEE components, EE systems, new technologies insertion and innovation management. The company is very much involved in future vehicles architectures deployment and EE system's reliability & safety.
Igor Ablaev graduated 1992 in engineering and physics at Saratov State University and 2004 in management at International Institute of Management “LINK” . He is winner of the all-Russia competition “Presidental Program: Manager of the 21st Century”.
In 2000 he launched the Finprom-Resource Industrial Group and start to develop control system for on-board vehicle nets (AVAS). Now his company develop new systems ASG (Automotive Smart Grid) and RT PLC. In 2010 he won the Russian prize as developer of the “Best Innovation Project”. Ablaev wrote a series of articles on applied physics in Russia, Europe and Asia.